GPS受信モジュールで現在位置を確認
GPS受信モジュールで現在位置を取得します。
OLEDディスプレイに現在位置を経度・緯度で表します。
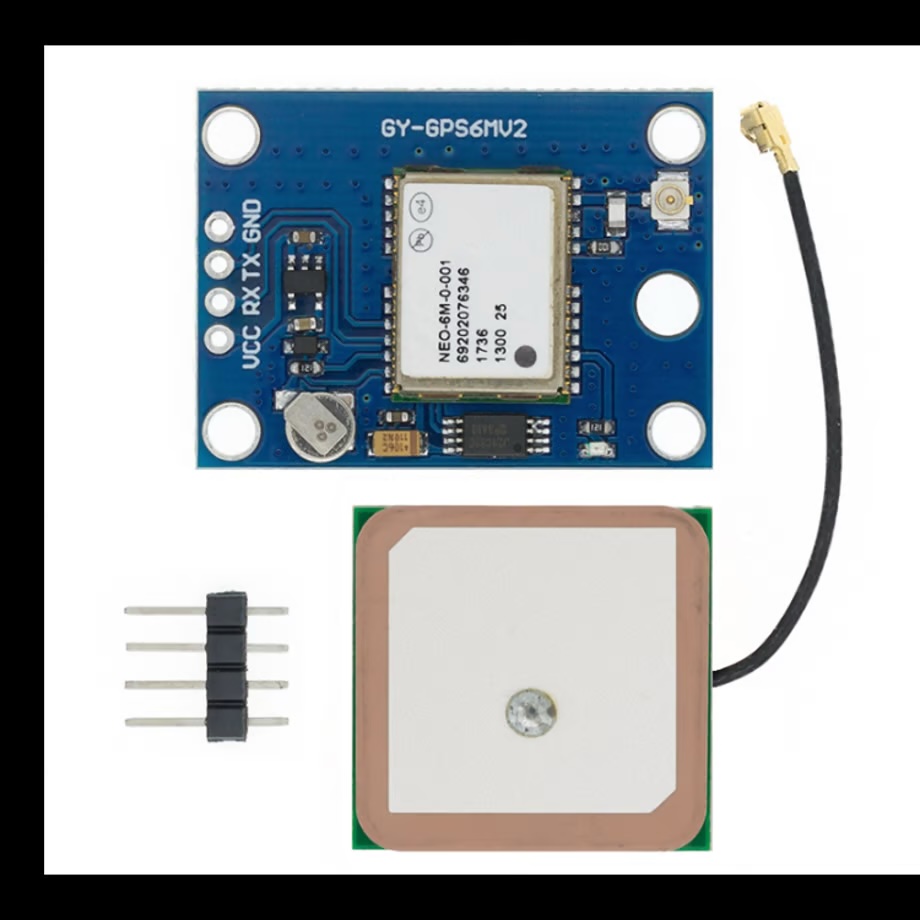
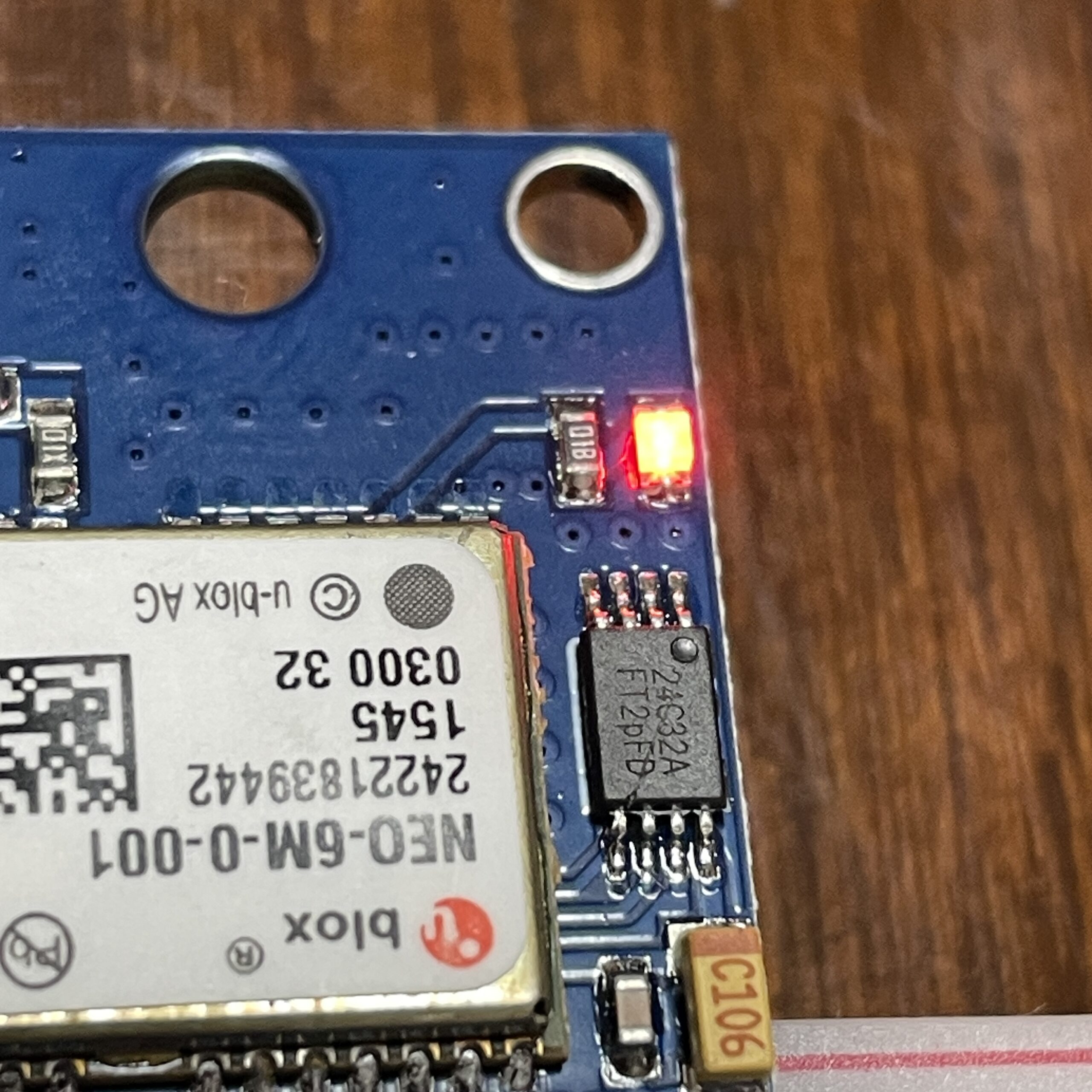
GPS受信モジュール
electronicwork.shop

Just a moment...
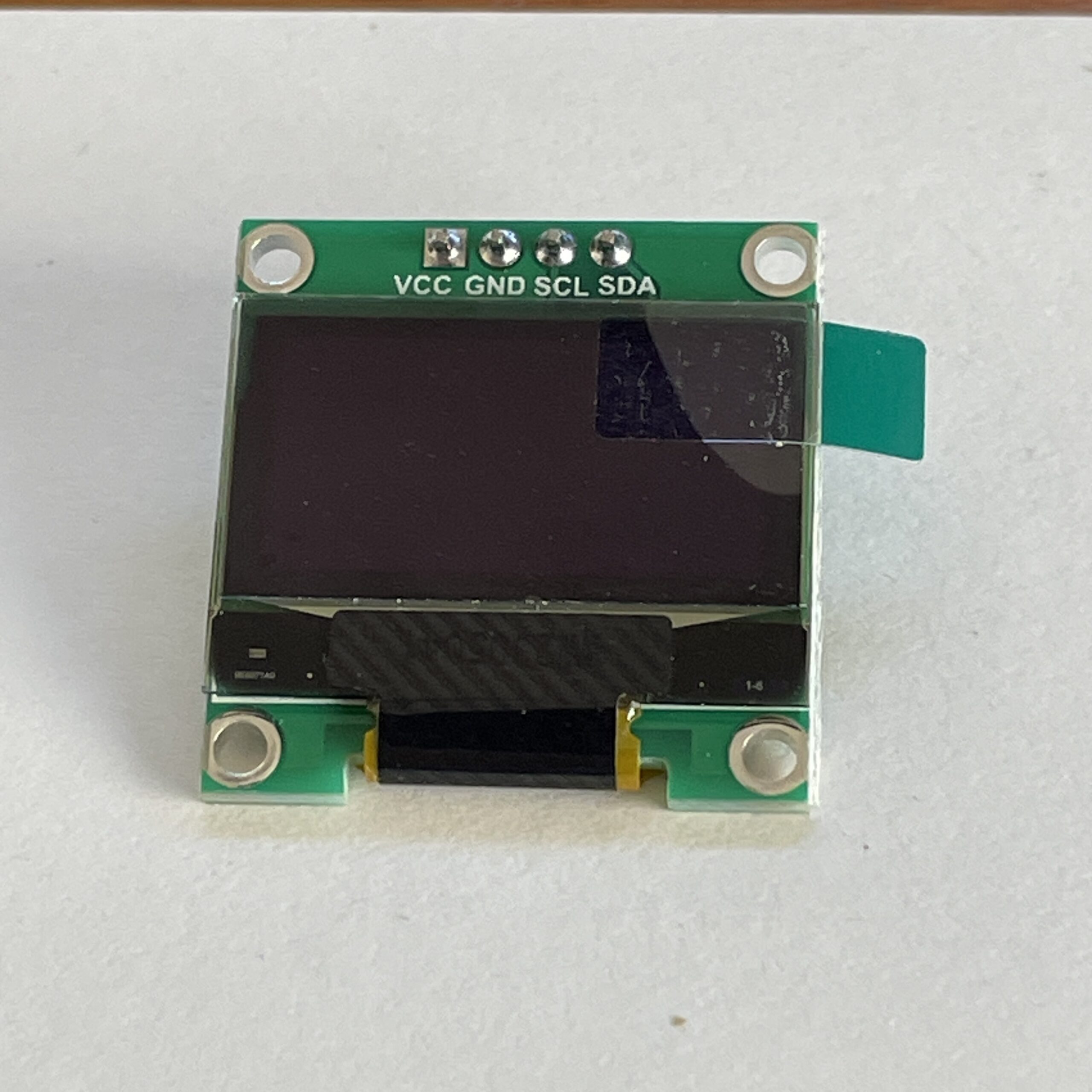
OLEDディスプレイ

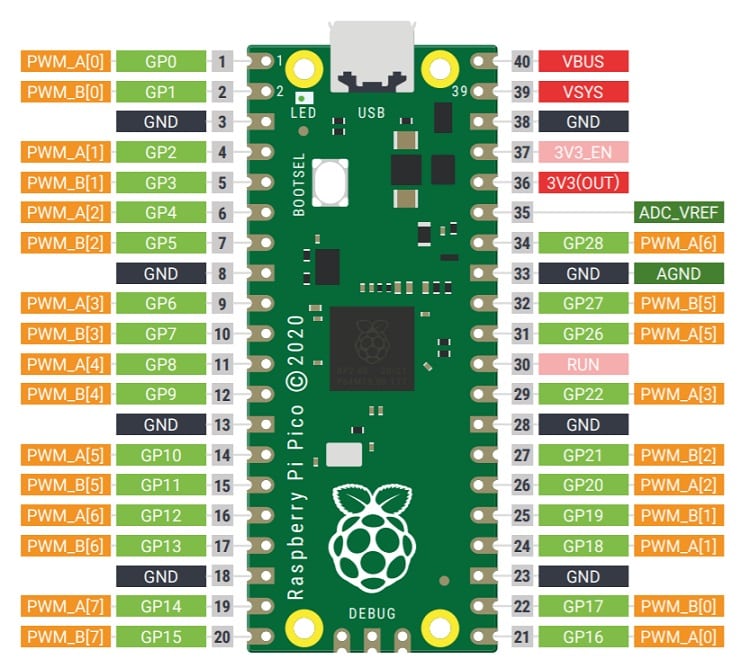
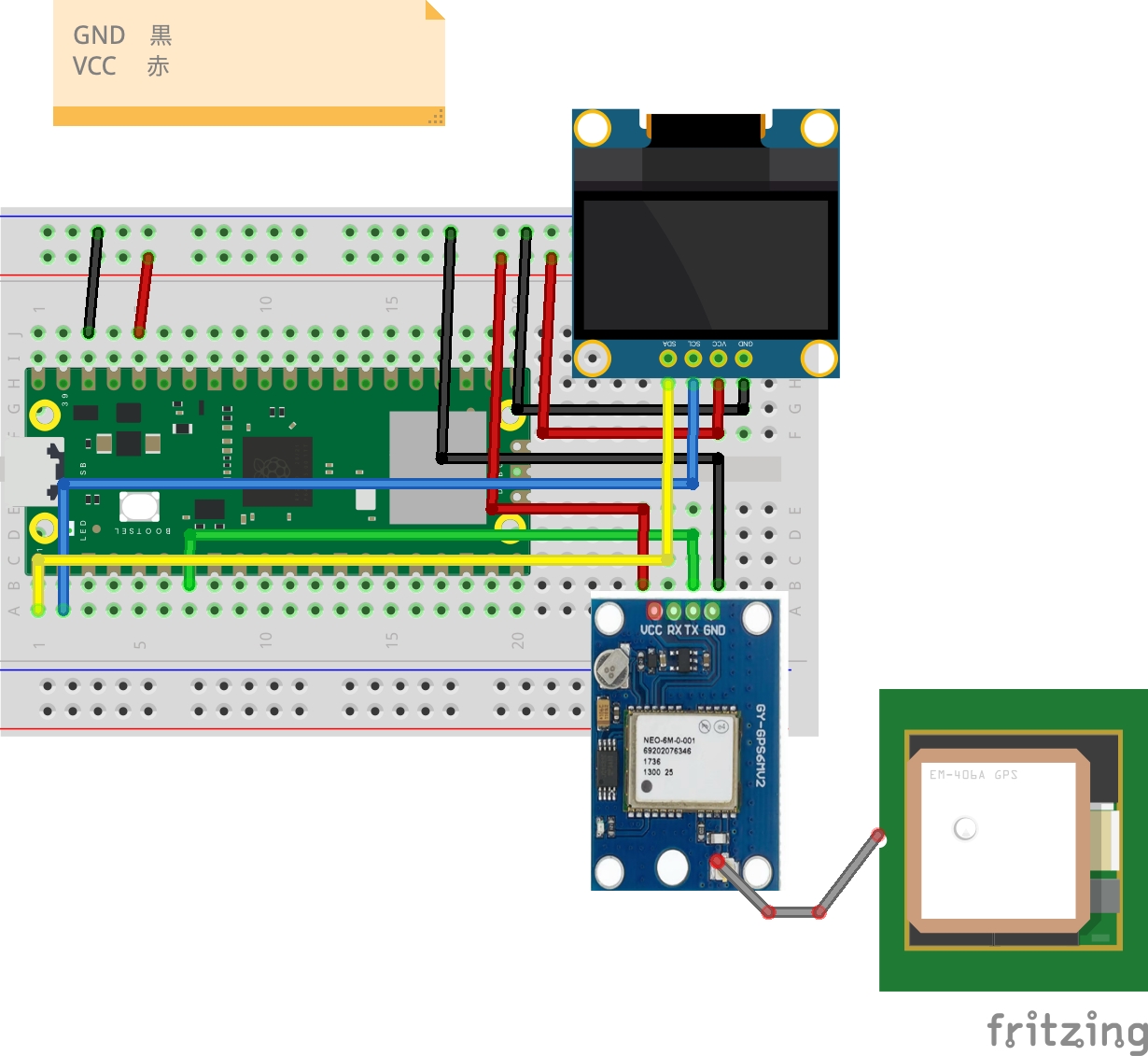
配線図
GPS受信モジュール
GND 38 黒
VCC 36 赤
TX 7 緑
OLEDディスプレイ
GND 38 黒
VCC 36 赤
SCL 2 黄
SDA 1 青
GND 38 黒
VCC 36 赤
TX 7 緑
OLEDディスプレイ
GND 38 黒
VCC 36 赤
SCL 2 黄
SDA 1 青
MicroPythonプログラム
from machine import Pin, UART, I2C
from ssd1306 import SSD1306_I2C
#Import utime library to implement delay
import utime, time
#Oled I2C connection
i2c=I2C(0,sda=Pin(0), scl=Pin(1), freq=400000)
oled = SSD1306_I2C(128, 64, i2c)
#GPS Module UART Connection
gps_module = UART(1, baudrate=9600, tx=Pin(4), rx=Pin(5))
#print gps module connection details
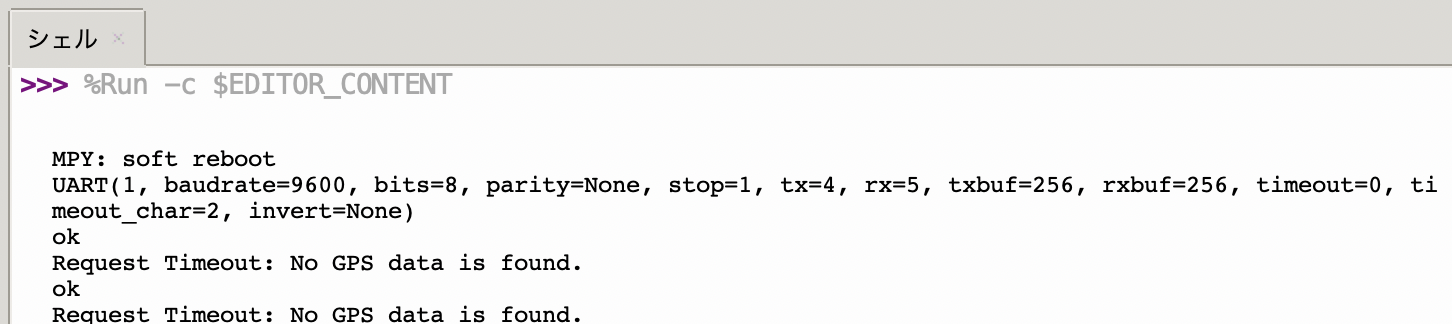
print(gps_module)
#Used to Store NMEA Sentences
buff = bytearray(255)
TIMEOUT = False
#store the status of satellite is fixed or not
FIX_STATUS = False
#Store GPS Coordinates
latitude = ""
longitude = ""
satellites = ""
gpsTime = ""
#function to get gps Coordinates
def getPositionData(gps_module):
global FIX_STATUS, TIMEOUT, latitude, longitude, satellites, gpsTime
#run while loop to get gps data
#or terminate while loop after 5 seconds timeout
timeout = time.time() + 8 # 8 seconds from now
while True:
gps_module.readline()
buff = str(gps_module.readline())
#parse $GPGGA term
#b'$GPGGA,094840.000,2941.8543,N,07232.5745,E,1,09,0.9,102.1,M,0.0,M,,*6C\r\n'
#print(buff)
parts = buff.split(',')
#if no gps displayed remove "and len(parts) == 15" from below if condition
if (parts[0] == "b'$GPGGA" and len(parts) == 15):
if(parts[1] and parts[2] and parts[3] and parts[4] and parts[5] and parts[6] and parts[7]):
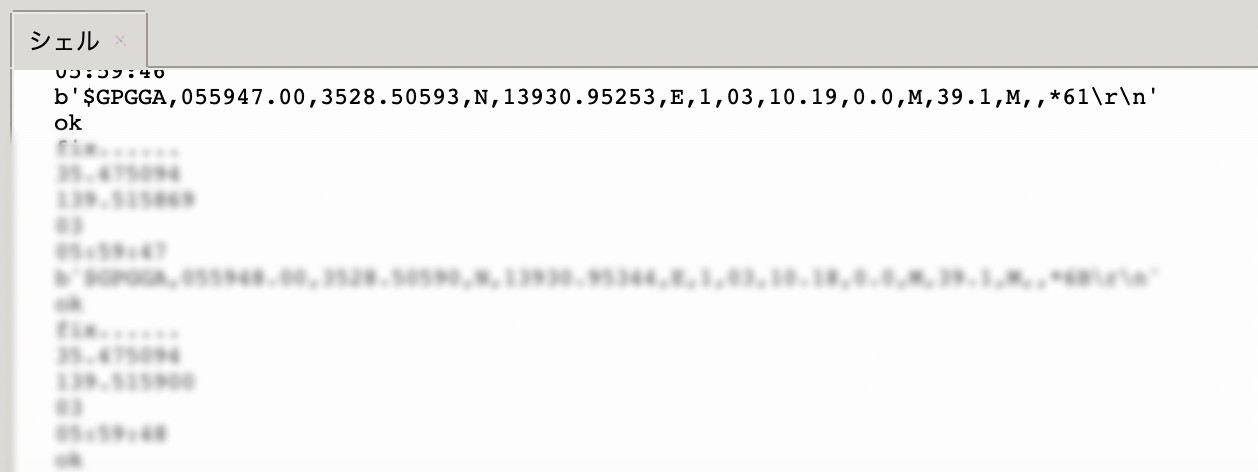
print(buff)
#print("Message ID : " + parts[0])
#print("UTC time : " + parts[1])
#print("Latitude : " + parts[2])
#print("N/S : " + parts[3])
#print("Longitude : " + parts[4])
#print("E/W : " + parts[5])
#print("Position Fix: " + parts[6])
#print("n sat : " + parts[7])
latitude = convertToDigree(parts[2])
# parts[3] contain 'N' or 'S'
if (parts[3] == 'S'):
latitude = -latitude
longitude = convertToDigree(parts[4])
# parts[5] contain 'E' or 'W'
if (parts[5] == 'W'):
longitude = -longitude
satellites = parts[7]
gpsTime = parts[1][0:2] + ":" + parts[1][2:4] + ":" + parts[1][4:6]
FIX_STATUS = True
break
if (time.time() > timeout):
TIMEOUT = True
break
utime.sleep_ms(500)
#function to convert raw Latitude and Longitude
#to actual Latitude and Longitude
def convertToDigree(RawDegrees):
RawAsFloat = float(RawDegrees)
firstdigits = int(RawAsFloat/100) #degrees
nexttwodigits = RawAsFloat - float(firstdigits*100) #minutes
Converted = float(firstdigits + nexttwodigits/60.0)
Converted = '{0:.6f}'.format(Converted) # to 6 decimal places
return str(Converted)
while True:
getPositionData(gps_module)
print ('ok')
#if gps data is found then print it on lcd
if(FIX_STATUS == True):
print("fix......")
oled.fill(0)
oled.text("Lat: "+latitude, 0, 0)
oled.text("Lng: "+longitude, 0, 10)
oled.text("No of Sat: "+satellites, 0, 20)
oled.text("Time: "+gpsTime, 0, 30)
oled.show()
print(latitude)
print(longitude)
print(satellites)
print(gpsTime)
FIX_STATUS = False
if(TIMEOUT == True):
print("Request Timeout: No GPS data is found.")
#--------------------------------------------------
#updated on 5-May-2022
oled.fill(0)
oled.text("No GPS data is found", 0, 0)
oled.show()
#--------------------------------------------------
TIMEOUT = False
from ssd1306 import SSD1306_I2C
ライブラリーファイルssd1306.pyをPICOに保存しておきます。
ライブラリーファイルssd1306.pyをPICOに保存しておきます。
電源接続して窓際に置き10分~20分で測位が成功してLEDが点滅するようになります。これは初回のコールドスタートなので次回以後は30秒以内で取得できるそうですが・・・。
実行

自由研究
テンテン
正確な位置がわかるということは紛失防止に役立つ「スマートタグ」として使えそうです。