BMP280 高精度大気圧センサーで測定
BMP280 で大気圧を測定します。
BMP280
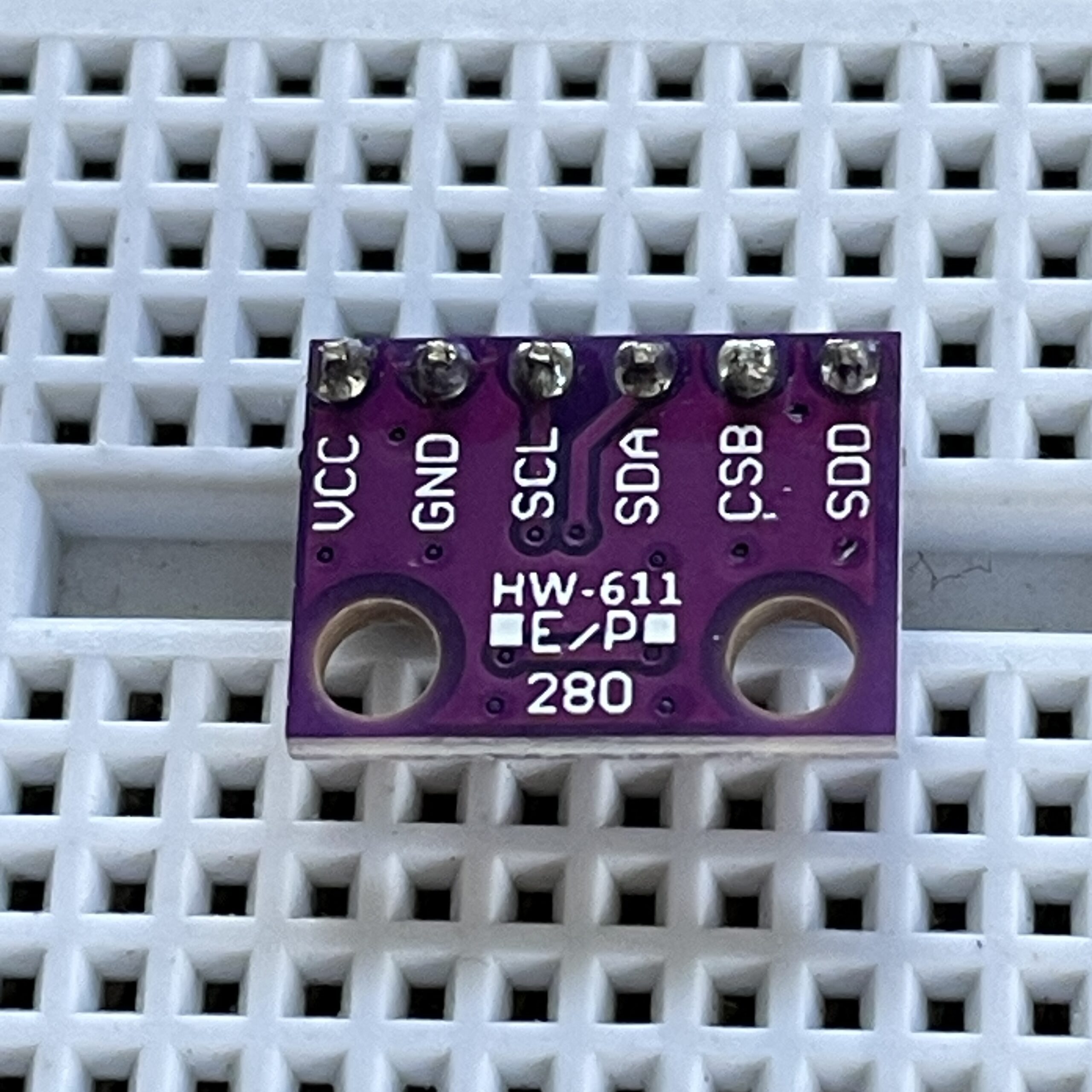
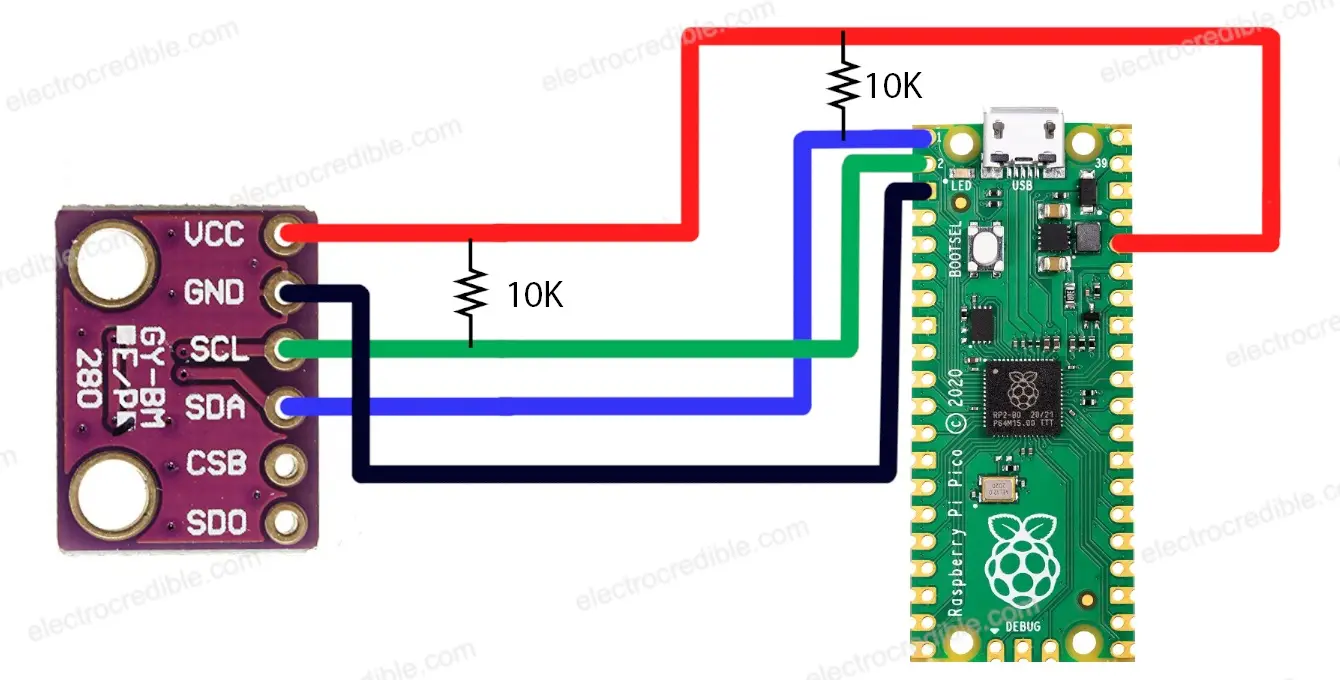
配線図
Raspberry Pi Pico Pin BMP280 Pin
Pin 36(3V3OUT) VCC
Pin 1(GP0) SDA
Pin 2(GP1) SCL
Pin 3(GND) GND
Pin 36(3V3OUT) VCC
Pin 1(GP0) SDA
Pin 2(GP1) SCL
Pin 3(GND) GND
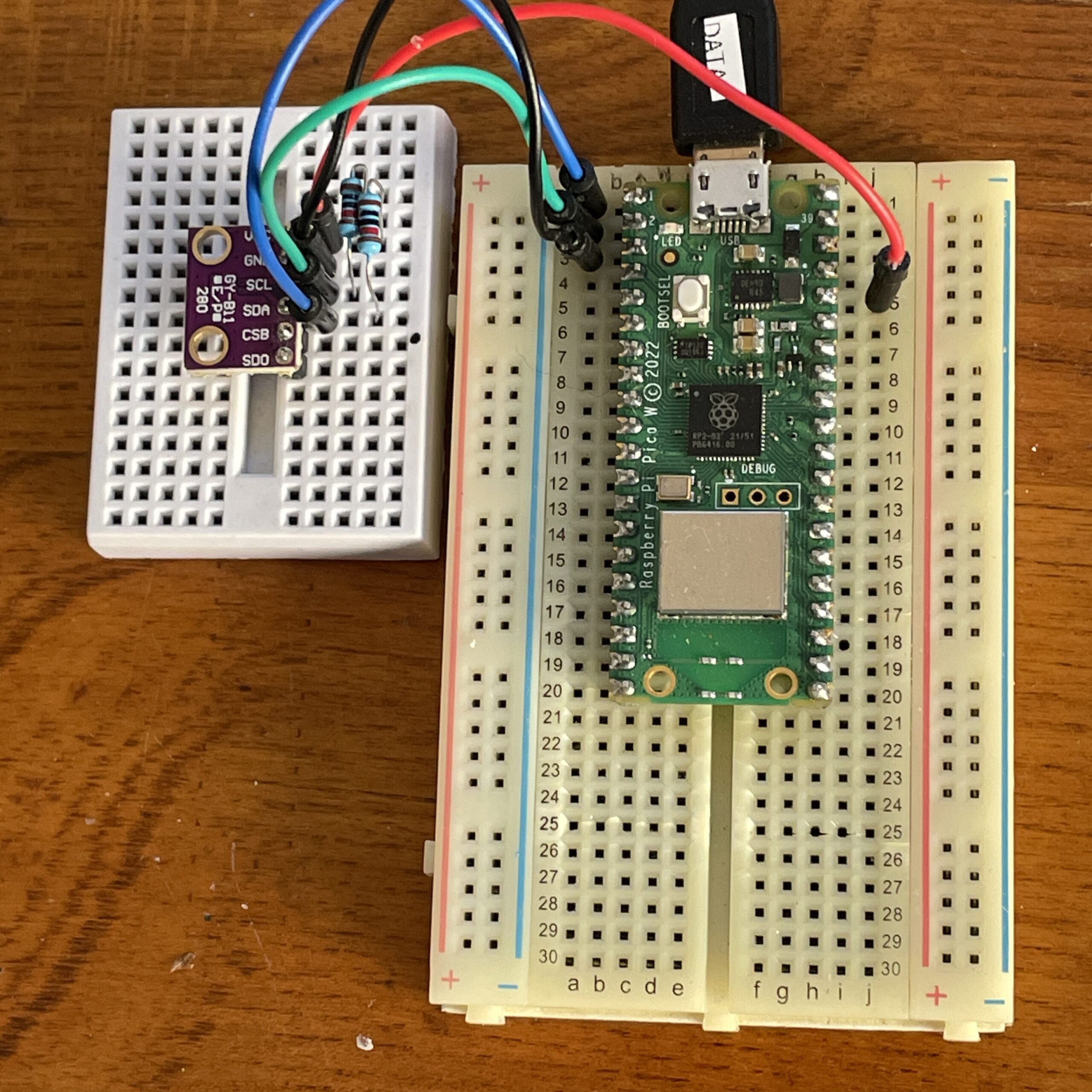
実際の配線
MicroPythonプログラム
事前準備
ライブラリープログラム bmp280.py
from micropython import const
from ustruct import unpack as unp
# Author David Stenwall (david at stenwall.io)
# Power Modes
BMP280_POWER_SLEEP = const(0)
BMP280_POWER_FORCED = const(1)
BMP280_POWER_NORMAL = const(3)
BMP280_SPI3W_ON = const(1)
BMP280_SPI3W_OFF = const(0)
BMP280_TEMP_OS_SKIP = const(0)
BMP280_TEMP_OS_1 = const(1)
BMP280_TEMP_OS_2 = const(2)
BMP280_TEMP_OS_4 = const(3)
BMP280_TEMP_OS_8 = const(4)
BMP280_TEMP_OS_16 = const(5)
BMP280_PRES_OS_SKIP = const(0)
BMP280_PRES_OS_1 = const(1)
BMP280_PRES_OS_2 = const(2)
BMP280_PRES_OS_4 = const(3)
BMP280_PRES_OS_8 = const(4)
BMP280_PRES_OS_16 = const(5)
# Standby settings in ms
BMP280_STANDBY_0_5 = const(0)
BMP280_STANDBY_62_5 = const(1)
BMP280_STANDBY_125 = const(2)
BMP280_STANDBY_250 = const(3)
BMP280_STANDBY_500 = const(4)
BMP280_STANDBY_1000 = const(5)
BMP280_STANDBY_2000 = const(6)
BMP280_STANDBY_4000 = const(7)
# IIR Filter setting
BMP280_IIR_FILTER_OFF = const(0)
BMP280_IIR_FILTER_2 = const(1)
BMP280_IIR_FILTER_4 = const(2)
BMP280_IIR_FILTER_8 = const(3)
BMP280_IIR_FILTER_16 = const(4)
# Oversampling setting
BMP280_OS_ULTRALOW = const(0)
BMP280_OS_LOW = const(1)
BMP280_OS_STANDARD = const(2)
BMP280_OS_HIGH = const(3)
BMP280_OS_ULTRAHIGH = const(4)
# Oversampling matrix
# (PRESS_OS, TEMP_OS, sample time in ms)
_BMP280_OS_MATRIX = [
[BMP280_PRES_OS_1, BMP280_TEMP_OS_1, 7],
[BMP280_PRES_OS_2, BMP280_TEMP_OS_1, 9],
[BMP280_PRES_OS_4, BMP280_TEMP_OS_1, 14],
[BMP280_PRES_OS_8, BMP280_TEMP_OS_1, 23],
[BMP280_PRES_OS_16, BMP280_TEMP_OS_2, 44]
]
# Use cases
BMP280_CASE_HANDHELD_LOW = const(0)
BMP280_CASE_HANDHELD_DYN = const(1)
BMP280_CASE_WEATHER = const(2)
BMP280_CASE_FLOOR = const(3)
BMP280_CASE_DROP = const(4)
BMP280_CASE_INDOOR = const(5)
_BMP280_CASE_MATRIX = [
[BMP280_POWER_NORMAL, BMP280_OS_ULTRAHIGH, BMP280_IIR_FILTER_4, BMP280_STANDBY_62_5],
[BMP280_POWER_NORMAL, BMP280_OS_STANDARD, BMP280_IIR_FILTER_16, BMP280_STANDBY_0_5],
[BMP280_POWER_FORCED, BMP280_OS_ULTRALOW, BMP280_IIR_FILTER_OFF, BMP280_STANDBY_0_5],
[BMP280_POWER_NORMAL, BMP280_OS_STANDARD, BMP280_IIR_FILTER_4, BMP280_STANDBY_125],
[BMP280_POWER_NORMAL, BMP280_OS_LOW, BMP280_IIR_FILTER_OFF, BMP280_STANDBY_0_5],
[BMP280_POWER_NORMAL, BMP280_OS_ULTRAHIGH, BMP280_IIR_FILTER_16, BMP280_STANDBY_0_5]
]
_BMP280_REGISTER_ID = const(0xD0)
_BMP280_REGISTER_RESET = const(0xE0)
_BMP280_REGISTER_STATUS = const(0xF3)
_BMP280_REGISTER_CONTROL = const(0xF4)
_BMP280_REGISTER_CONFIG = const(0xF5) # IIR filter config
_BMP280_REGISTER_DATA = const(0xF7)
class BMP280:
def __init__(self, i2c_bus, addr=0x76, use_case=BMP280_CASE_HANDHELD_DYN):
self._bmp_i2c = i2c_bus
self._i2c_addr = addr
# read calibration data
# < little-endian
# H unsigned short
# h signed short
self._T1 = unp('<H', self._read(0x88, 2))[0]
self._T2 = unp('<h', self._read(0x8A, 2))[0]
self._T3 = unp('<h', self._read(0x8C, 2))[0]
self._P1 = unp('<H', self._read(0x8E, 2))[0]
self._P2 = unp('<h', self._read(0x90, 2))[0]
self._P3 = unp('<h', self._read(0x92, 2))[0]
self._P4 = unp('<h', self._read(0x94, 2))[0]
self._P5 = unp('<h', self._read(0x96, 2))[0]
self._P6 = unp('<h', self._read(0x98, 2))[0]
self._P7 = unp('<h', self._read(0x9A, 2))[0]
self._P8 = unp('<h', self._read(0x9C, 2))[0]
self._P9 = unp('<h', self._read(0x9E, 2))[0]
# output raw
self._t_raw = 0
self._t_fine = 0
self._t = 0
self._p_raw = 0
self._p = 0
self.read_wait_ms = 0 # interval between forced measure and readout
self._new_read_ms = 200 # interval between
self._last_read_ts = 0
if use_case is not None:
self.use_case(use_case)
def _read(self, addr, size=1):
return self._bmp_i2c.readfrom_mem(self._i2c_addr, addr, size)
def _write(self, addr, b_arr):
if not type(b_arr) is bytearray:
b_arr = bytearray([b_arr])
return self._bmp_i2c.writeto_mem(self._i2c_addr, addr, b_arr)
def _gauge(self):
# TODO limit new reads
# read all data at once (as by spec)
d = self._read(_BMP280_REGISTER_DATA, 6)
self._p_raw = (d[0] << 12) + (d[1] << 4) + (d[2] >> 4)
self._t_raw = (d[3] << 12) + (d[4] << 4) + (d[5] >> 4)
self._t_fine = 0
self._t = 0
self._p = 0
def reset(self):
self._write(_BMP280_REGISTER_RESET, 0xB6)
def load_test_calibration(self):
self._T1 = 27504
self._T2 = 26435
self._T3 = -1000
self._P1 = 36477
self._P2 = -10685
self._P3 = 3024
self._P4 = 2855
self._P5 = 140
self._P6 = -7
self._P7 = 15500
self._P8 = -14600
self._P9 = 6000
def load_test_data(self):
self._t_raw = 519888
self._p_raw = 415148
def print_calibration(self):
print("T1: {} {}".format(self._T1, type(self._T1)))
print("T2: {} {}".format(self._T2, type(self._T2)))
print("T3: {} {}".format(self._T3, type(self._T3)))
print("P1: {} {}".format(self._P1, type(self._P1)))
print("P2: {} {}".format(self._P2, type(self._P2)))
print("P3: {} {}".format(self._P3, type(self._P3)))
print("P4: {} {}".format(self._P4, type(self._P4)))
print("P5: {} {}".format(self._P5, type(self._P5)))
print("P6: {} {}".format(self._P6, type(self._P6)))
print("P7: {} {}".format(self._P7, type(self._P7)))
print("P8: {} {}".format(self._P8, type(self._P8)))
print("P9: {} {}".format(self._P9, type(self._P9)))
def _calc_t_fine(self):
# From datasheet page 22
self._gauge()
if self._t_fine == 0:
var1 = (((self._t_raw >> 3) - (self._T1 << 1)) * self._T2) >> 11
var2 = (((((self._t_raw >> 4) - self._T1)
* ((self._t_raw >> 4)
- self._T1)) >> 12)
* self._T3) >> 14
self._t_fine = var1 + var2
@property
def temperature(self):
self._calc_t_fine()
if self._t == 0:
self._t = ((self._t_fine * 5 + 128) >> 8) / 100.
return self._t
@property
def pressure(self):
# From datasheet page 22
self._calc_t_fine()
if self._p == 0:
var1 = self._t_fine - 128000
var2 = var1 * var1 * self._P6
var2 = var2 + ((var1 * self._P5) << 17)
var2 = var2 + (self._P4 << 35)
var1 = ((var1 * var1 * self._P3) >> 8) + ((var1 * self._P2) << 12)
var1 = (((1 << 47) + var1) * self._P1) >> 33
if var1 == 0:
return 0
p = 1048576 - self._p_raw
p = int((((p << 31) - var2) * 3125) / var1)
var1 = (self._P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self._P8 * p) >> 19
p = ((p + var1 + var2) >> 8) + (self._P7 << 4)
self._p = p / 256.0
return self._p
def _write_bits(self, address, value, length, shift=0):
d = self._read(address)[0]
m = int('1' * length, 2) << shift
d &= ~m
d |= m & value << shift
self._write(address, d)
def _read_bits(self, address, length, shift=0):
d = self._read(address)[0]
return d >> shift & int('1' * length, 2)
@property
def standby(self):
return self._read_bits(_BMP280_REGISTER_CONFIG, 3, 5)
@standby.setter
def standby(self, v):
assert 0 <= v <= 7
self._write_bits(_BMP280_REGISTER_CONFIG, v, 3, 5)
@property
def iir(self):
return self._read_bits(_BMP280_REGISTER_CONFIG, 3, 2)
@iir.setter
def iir(self, v):
assert 0 <= v <= 4
self._write_bits(_BMP280_REGISTER_CONFIG, v, 3, 2)
@property
def spi3w(self):
return self._read_bits(_BMP280_REGISTER_CONFIG, 1)
@spi3w.setter
def spi3w(self, v):
assert v in (0, 1)
self._write_bits(_BMP280_REGISTER_CONFIG, v, 1)
@property
def temp_os(self):
return self._read_bits(_BMP280_REGISTER_CONTROL, 3, 5)
@temp_os.setter
def temp_os(self, v):
assert 0 <= v <= 5
self._write_bits(_BMP280_REGISTER_CONTROL, v, 3, 5)
@property
def press_os(self):
return self._read_bits(_BMP280_REGISTER_CONTROL, 3, 2)
@press_os.setter
def press_os(self, v):
assert 0 <= v <= 5
self._write_bits(_BMP280_REGISTER_CONTROL, v, 3, 2)
@property
def power_mode(self):
return self._read_bits(_BMP280_REGISTER_CONTROL, 2)
@power_mode.setter
def power_mode(self, v):
assert 0 <= v <= 3
self._write_bits(_BMP280_REGISTER_CONTROL, v, 2)
@property
def is_measuring(self):
return bool(self._read_bits(_BMP280_REGISTER_STATUS, 1, 3))
@property
def is_updating(self):
return bool(self._read_bits(_BMP280_REGISTER_STATUS, 1))
@property
def chip_id(self):
return self._read(_BMP280_REGISTER_ID, 1)
@property
def in_normal_mode(self):
return self.power_mode == BMP280_POWER_NORMAL
def force_measure(self):
self.power_mode = BMP280_POWER_FORCED
def normal_measure(self):
self.power_mode = BMP280_POWER_NORMAL
def sleep(self):
self.power_mode = BMP280_POWER_SLEEP
def use_case(self, uc):
assert 0 <= uc <= 5
pm, oss, iir, sb = _BMP280_CASE_MATRIX[uc]
p_os, t_os, self.read_wait_ms = _BMP280_OS_MATRIX[oss]
self._write(_BMP280_REGISTER_CONFIG, (iir << 2) + (sb << 5))
self._write(_BMP280_REGISTER_CONTROL, pm + (p_os << 2) + (t_os << 5))
def oversample(self, oss):
assert 0 <= oss <= 4
p_os, t_os, self.read_wait_ms = _BMP280_OS_MATRIX[oss]
self._write_bits(_BMP280_REGISTER_CONTROL, p_os + (t_os << 3), 2)
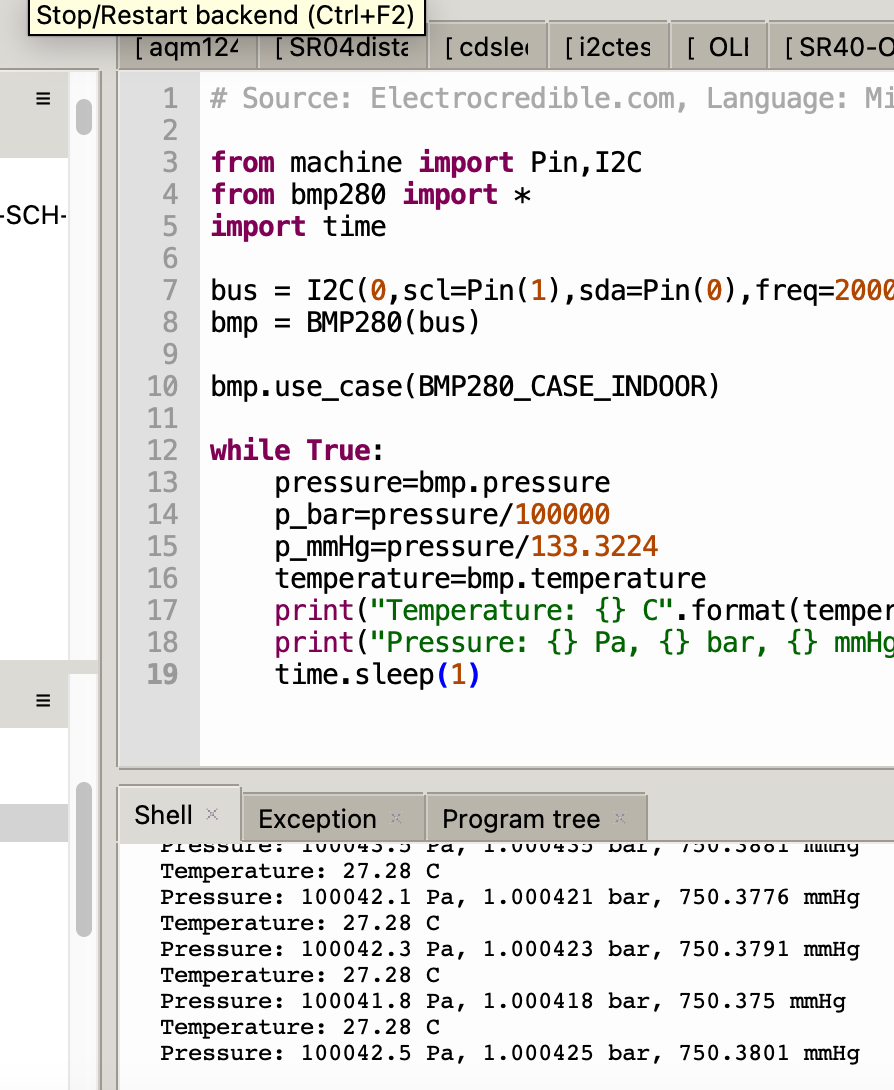
実行プログラム
from machine import Pin,I2C
from bmp280 import *
import time
bus = I2C(0,scl=Pin(1),sda=Pin(0),freq=200000)
bmp = BMP280(bus)
bmp.use_case(BMP280_CASE_INDOOR)
while True:
pressure=bmp.pressure
p_bar=pressure/100000
p_mmHg=pressure/133.3224
temperature=bmp.temperature
print("Temperature: {} C".format(temperature))
print("Pressure: {} Pa, {} bar, {} mmHg".format(pressure,p_bar,p_mmHg))
time.sleep(1)
実行

自由研究
テンテン
OLED ディスプレイに BMP280 データを表示してみましょう。
詳しくはWEBで見てやってみよう。





