サーボモーターを制御します。
サーボモーターを動かします。
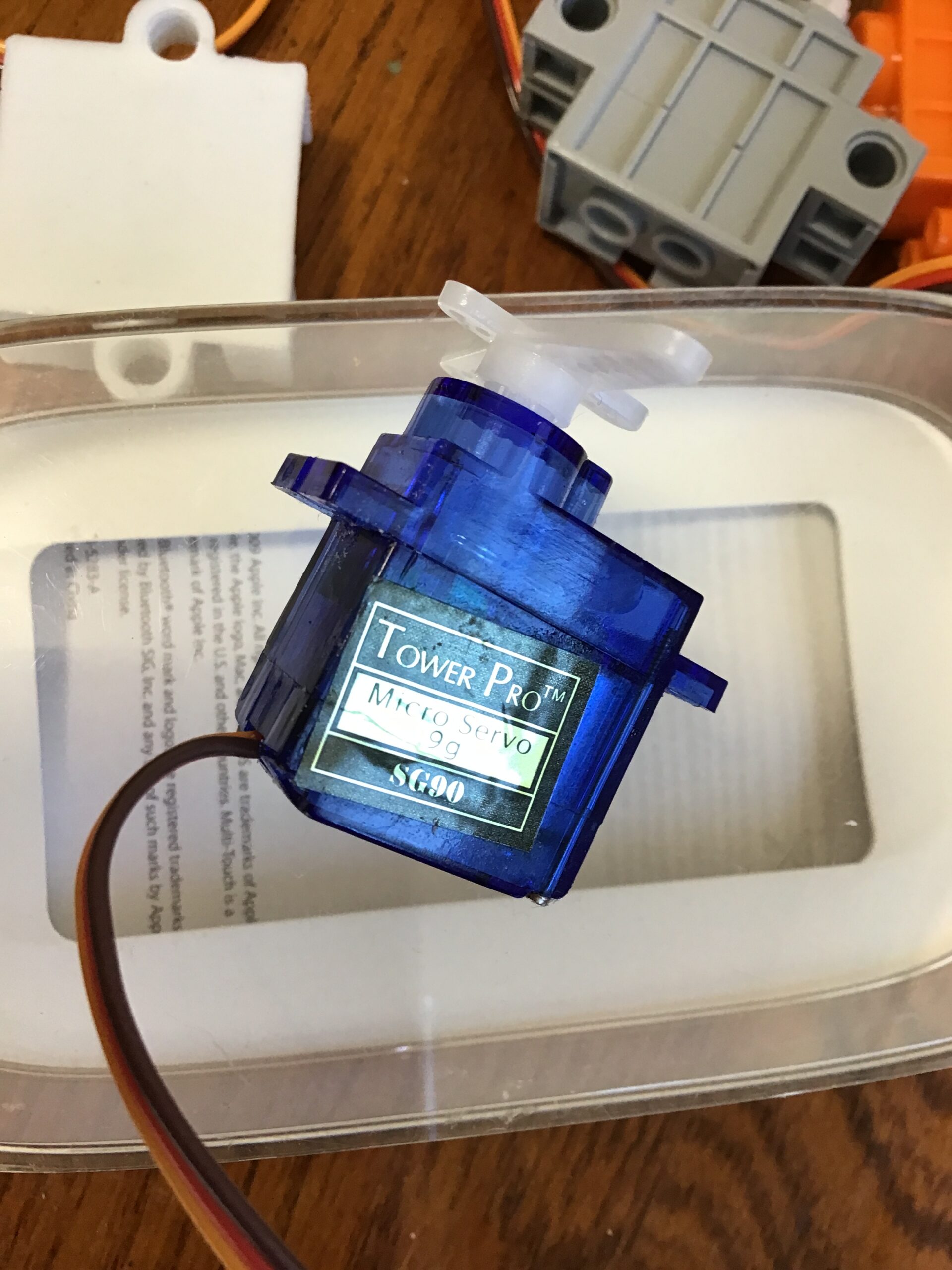
サーボモーター
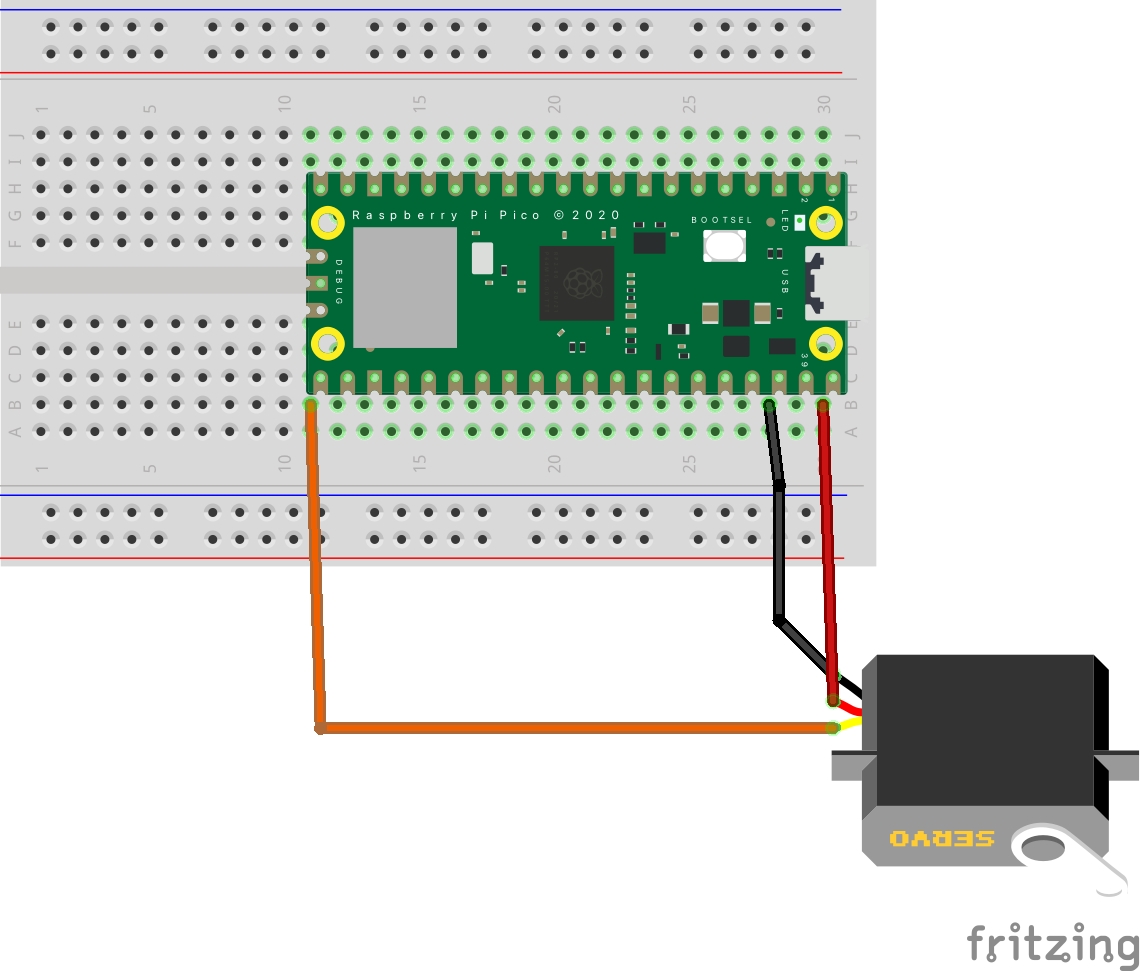
配線図
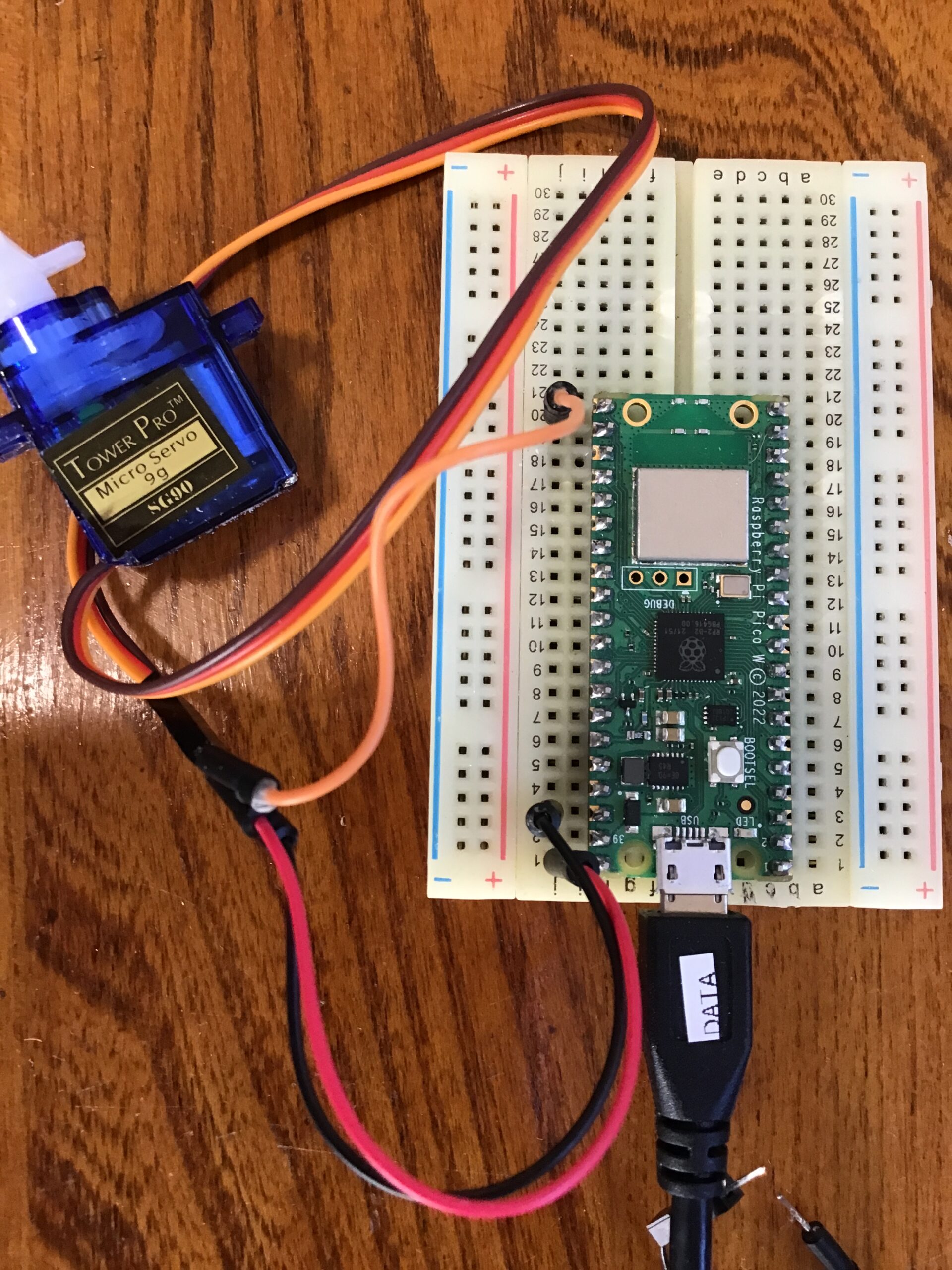
実際の配線
MicroPythonプログラム
from machine import Pin, PWM
import utime
pwm = PWM(Pin(16))
pwm.freq(50)
#sensor_adc = machine.ADC(0)
def servo_value(degree):
return int((degree * 9.5 / 180 + 2.5) * 65535 / 100)
while True:
#reading = sensor_adc.read_u16()
pwm.duty_u16(servo_value(0))
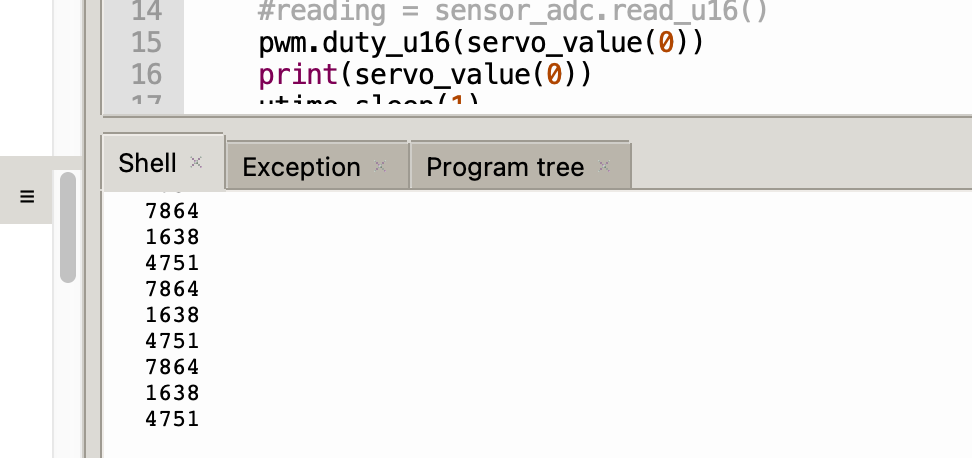
print(servo_value(0))
utime.sleep(1)
pwm.duty_u16(servo_value(90))
print(servo_value(90))
utime.sleep(1)
pwm.duty_u16(servo_value(180))
print(servo_value(180))
utime.sleep(1)
実行