赤外線LEDで複数の数字データーの赤外線信号を送信
以前作った赤外線センサー送信機にスイッチをつけて赤外線パルスで複数の数字データーを送信します。
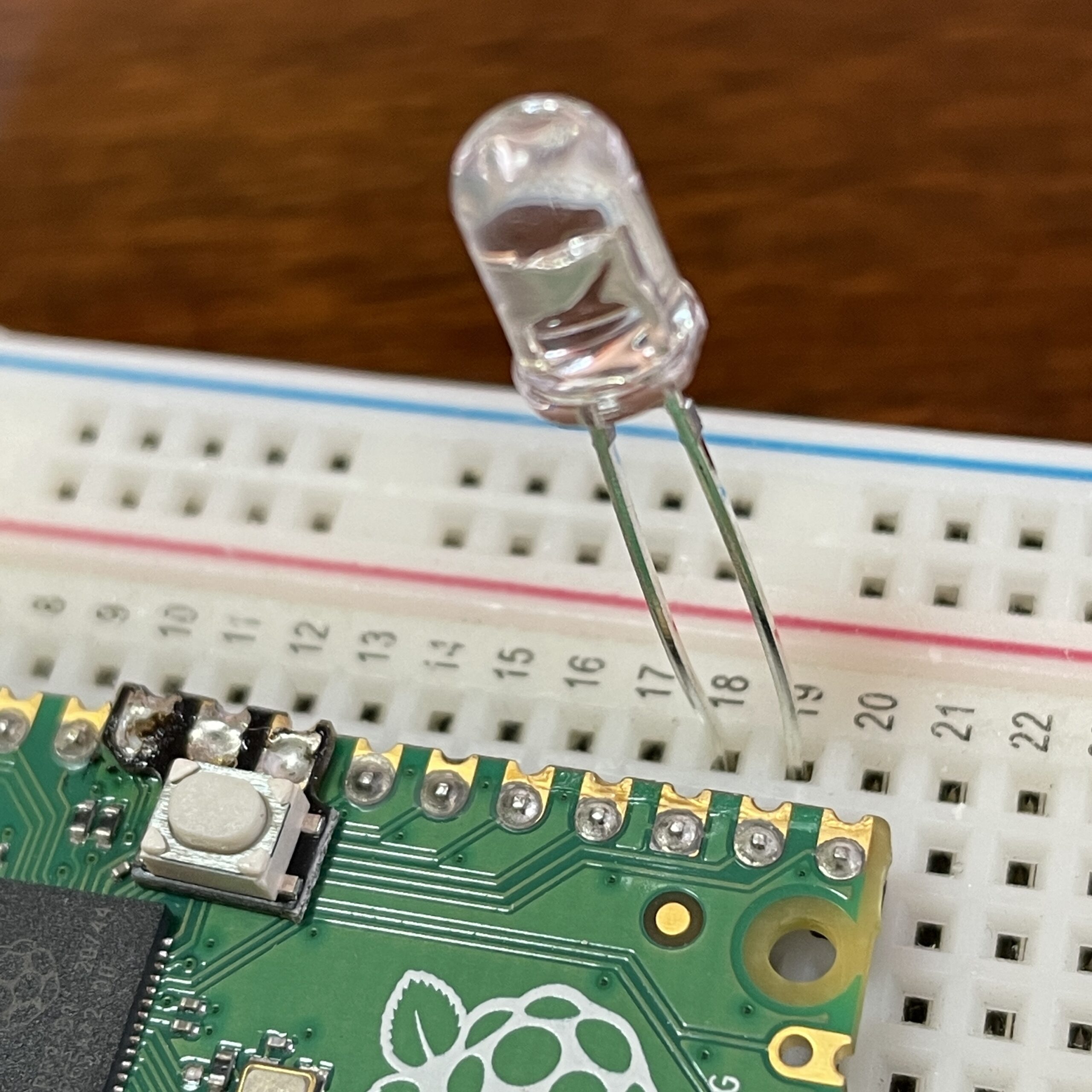
赤外線LED
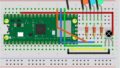
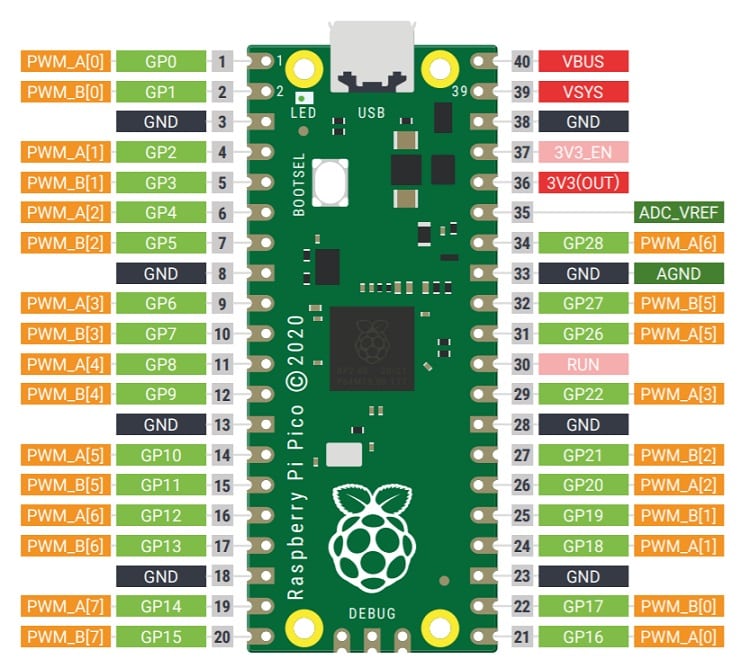
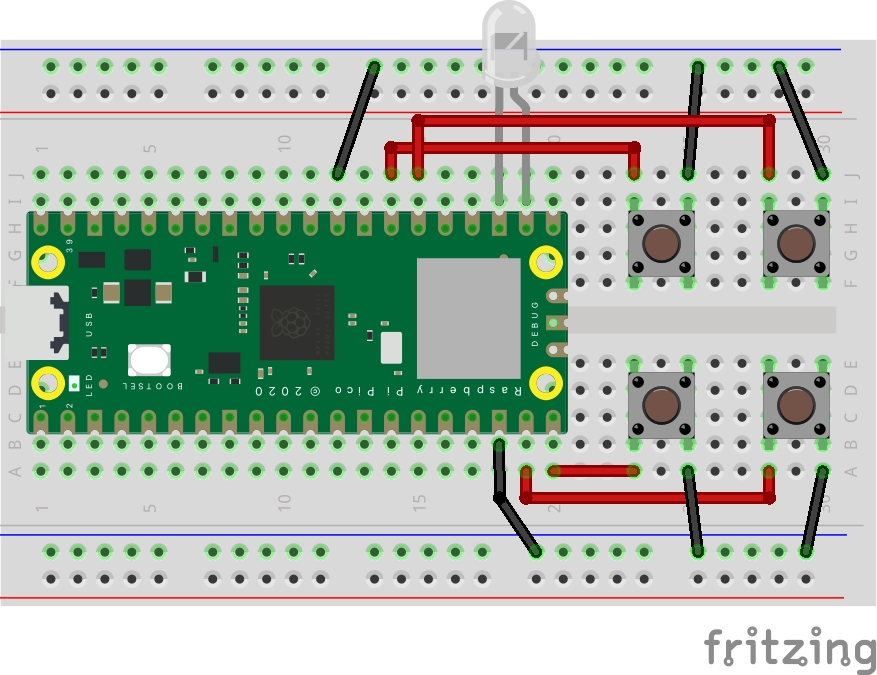
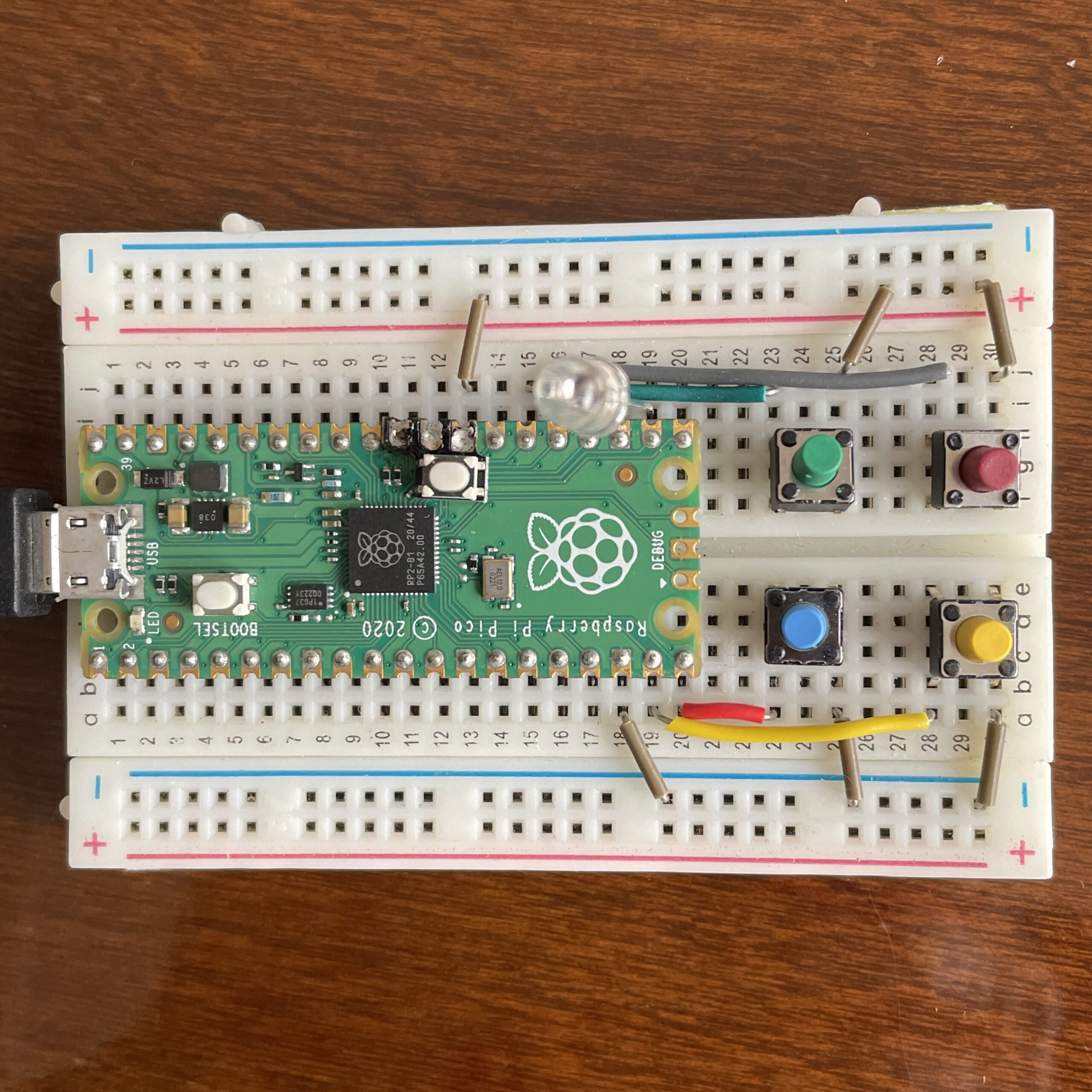
配線図
プラス端子 GP 17 長い方
Gnd アース(GND) 短い方 タクトスイッチ GP14 15 19 20 GND
Gnd アース(GND) 短い方 タクトスイッチ GP14 15 19 20 GND
MicroPythonプログラム
# GPIOピン制御・PWM制御のライブラリを読み込む
from machine import Pin, PWM
# 時間関連のライブラリを読み込む
import utime
# スイッチが押されたときの値を保存する変数
last_pressed_value = 0
def initialize_switches(switch_pins):
return {pin: machine.Pin(pin, machine.Pin.IN, machine.Pin.PULL_UP) for pin in switch_pins}
def is_switch_pressed(switch, debounce_threshold=10):
if switch.value() == 0:
utime.sleep_ms(10) # デバウンシングのための待機時間
return switch.value() == 0
return False
def process_switch(pin):
value = switch_values.get(pin, 0)
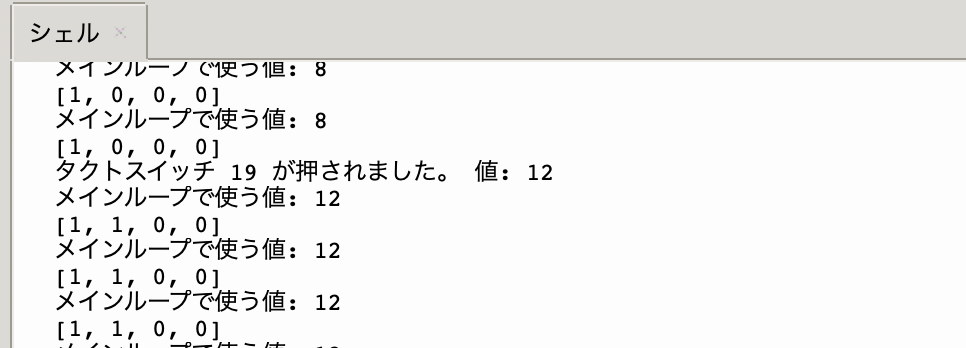
print(f"タクトスイッチ {pin} が押されました。 値: {value}")
global last_pressed_value
last_pressed_value = value
# タクトスイッチが接続されたGPIOピンのリスト
switch_pins = [14, 15, 19, 20]
# タクトスイッチの状態を保持するピンの辞書
switches = initialize_switches(switch_pins)
# タクトスイッチが最後に押された時間の辞書
last_pressed_times = {pin: 0 for pin in switch_pins}
# タクトスイッチごとに割り当てる値
switch_values = {
14: 8,
15: 10,
19: 12,
20: 14
}
# タクトスイッチが押されたかどうかを確認するための閾値
pressed_threshold = 20 # ミリ秒
# PWM制御を行うピンの設定
ir = PWM(Pin(17, Pin.OUT))
# PWM制御の動作周波数を設定
# 一般的なリモコンで使用されている周波数 = 38KHz
f = 38000
ir.freq(f)
# PWM制御の周期(波が上下に1回振動するのにかかる時間)
# 周期 = 1/周波数(38kHz)= 26μs
# PWMのデューティー比(HIGHとLOWの比率)
# 一般的なリモコンのデューティー比 = HIGH:1/3、LOW:2/3
# 16bitの最大値 = FFFF(16進数)= 65535(10進数)
# 65535 * 0.3333 = 21845(10進数)= 5555(16進数)
dty = 0x5555
# 解析したデータが信号を一つ送るのに掛かっていた時間 = 300us
# 300usの長さの信号になるようにPWM信号を繰り返す
# 300us/26us = 11.5回
# しかしtime.ticksで赤外線通信の稼働時間を計測した結果、
# 理想のフレーム長(53ms~55ms)に足りない
# よって稼働時間が53ms以上になるように「20」と調整した
adj = 20
def decimal_to_binary_list(decimal):
binary_list = list(bin(decimal)[2:])
# bin()関数で2進数文字列を取得し、最初の2文字('0b')を取り除く
binary_list = [int(bit) for bit in binary_list]
# 文字列を整数のリストに変換
return binary_list
def sendcode(data):
decimal_number = data
# 10進数を2進数に変換
binary_result = decimal_to_binary_list(decimal_number)
# 結果を表示
print(binary_result)
# 赤外線通信の稼働時間を計測開始
start = utime.ticks_us()
# 16bitのコードを読み込む
for bit in binary_result:
# コードの値が「1」のときの処理
if(bit == 1):
# デューティー比1/3がHIGHのPWM信号を送信(adj回分)
for i in range(1, 1*adj):
ir.duty_u16(dty)
# LOWのPWM信号を送信(7×adj回分)
for i in range(1, 7*adj):
ir.duty_u16(0)
# コードの値が「0」のときの処理
else:
# デューティー比1/3がHIGHのPWM信号を送信(adj回分)
for i in range(1, 1*adj):
ir.duty_u16(dty)
# LOWのPWM信号を送信(7×adj回分)
for i in range(1, 3*adj):
ir.duty_u16(0)
# ストップビット(データの終端を示す信号)
for l in range(1,1*adj):
ir.duty_u16(dty)
# トレーラー(通信の終わりを示す信号)
for l in range(1,1*adj):
for i in range(1,97):
ir.duty_u16(0)
# 赤外線通信の稼働時間を出力(53000us以上になっていればOK)
#print(time.ticks_diff(time.ticks_us(), start))
#data = 0
while True:
#print("現在のswitch_values:", switch_values) # グローバル変数を出力
for pin, switch in switches.items():
current_time = utime.ticks_ms()
# デバウンシング処理
if is_switch_pressed(switch):
if utime.ticks_diff(current_time, last_pressed_times[pin]) > pressed_threshold:
process_switch(pin)
last_pressed_times[pin] = current_time
print("メインループで使う値:", last_pressed_value)
# スイッチの反応を防ぐために少し待機
utime.sleep_ms(100)
#data = pressed_value
sendcode(last_pressed_value)
utime.sleep_ms(1000)
一般的なリモコンで使用されている周波数 をPWMで発生させて赤外線LEDに送り発進させます。
実行
自由研究
テンテン
今回は4桁の2進数なので0〜15までの数値を送信できます。
受信機を作ると赤外線リモコンができます。